




Assistenzsystem zur 3D-Bahnkurvensteuerung von Mehrachs-Systemen
Herausforderung
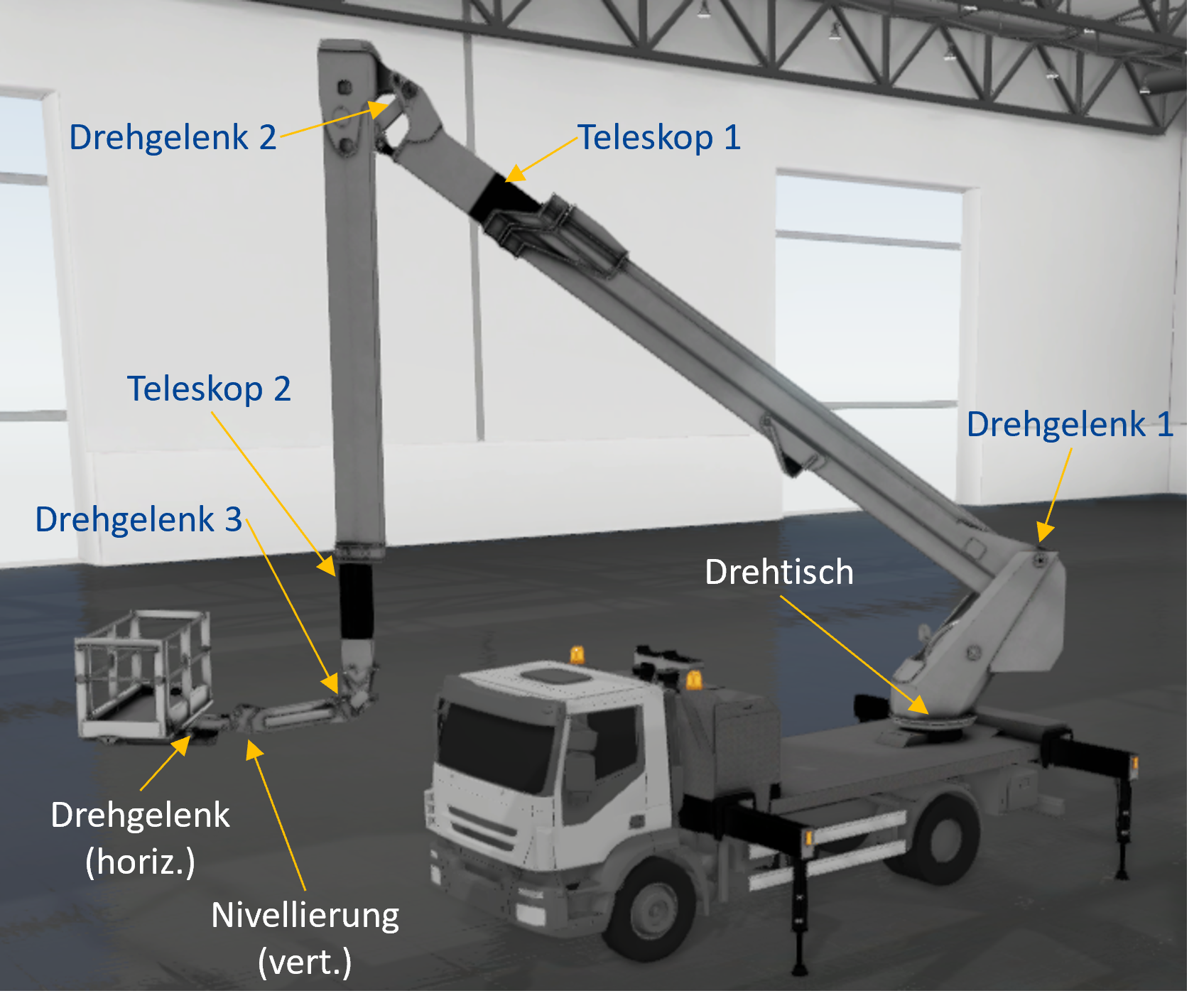
Mobile Maschinen haben eine große Anzahl von individuell steuerbaren Freiheitsgraden. Bei der gezeigten Hubarbeitsbühne müssen beispielsweise bis zu 8 hydraulische Achsen vom Bediener parallel gesteuert werden, um eine reibungslose Bewegung im Raum des Fahrkorbs entlang einer Bahnkurve zu ermöglichen. Zudem erfordert die Steuerung der Korbposition, dass der Bediener in Achsenkoordinaten der Antriebssysteme denkt. Zusammenfassend lässt sich sagen, dass die Bedienung sehr kompliziert ist und viel Erfahrung und ein hohes Maß an Aufmerksamkeit seitens des Bedieners erfordert.

Ziel
Entwicklung eines Assistenzsystems zur vereinfachten und sicheren Bedienung von Mehrachs-Systemen mit folgenden Eigenschaften:
- Intuitive Richtungsvorgabe der Korbfront in globalen x-y-z Koordinaten
- Teilautomatisiertes Abfahren vordefinierter Bahnkurven – Bediener definiert ein Ziel und steuert lediglich die Verfahrgeschwindigkeit
- Kompensation von Störgrößen wie Schwingungen und Reibung
Nutzen
Durch die vereinfachte Bedienung ergeben sich gleich mehrerer Vorteile:
- Bessere Fokussierung des Anwenders auf seine Kernaufgabe
- Erhöhte Arbeitsgeschwindigkeit und Produktivität
- Gleichmäßige Plattformbewegung
- Verbesserte Sicherheit
- Reduzierter Schulungsbedarf
Modellbasierte Entwicklung mit echtzeitfähigem Digitalen Zwilling und Hardware-in-the-Loop
Das Assistenzsystem wurde in enger Zusammenarbeit mit der Firma meastream mittels modellbasiertem Ansatz entwickelt.
Die Entwicklung der Trajektorienplanung und Antriebssteuerung erfolgt auf Basis von technisch-mathematischen Modellen der Hubarbeitsbühne, dem sogenannten digitalen Zwilling. Die Validierung, Erprobung und Optimierung des Assistenzsystems erfolgt durch Kopplung des echtzeitfähigen digitalen Zwillings (EDZ) mit der angestrebten Maschinenbedien- und Steuerungshardware in der Hardware-in-Loop (HiL)-Entwicklungsumgebung von FLUIDON | Cube.
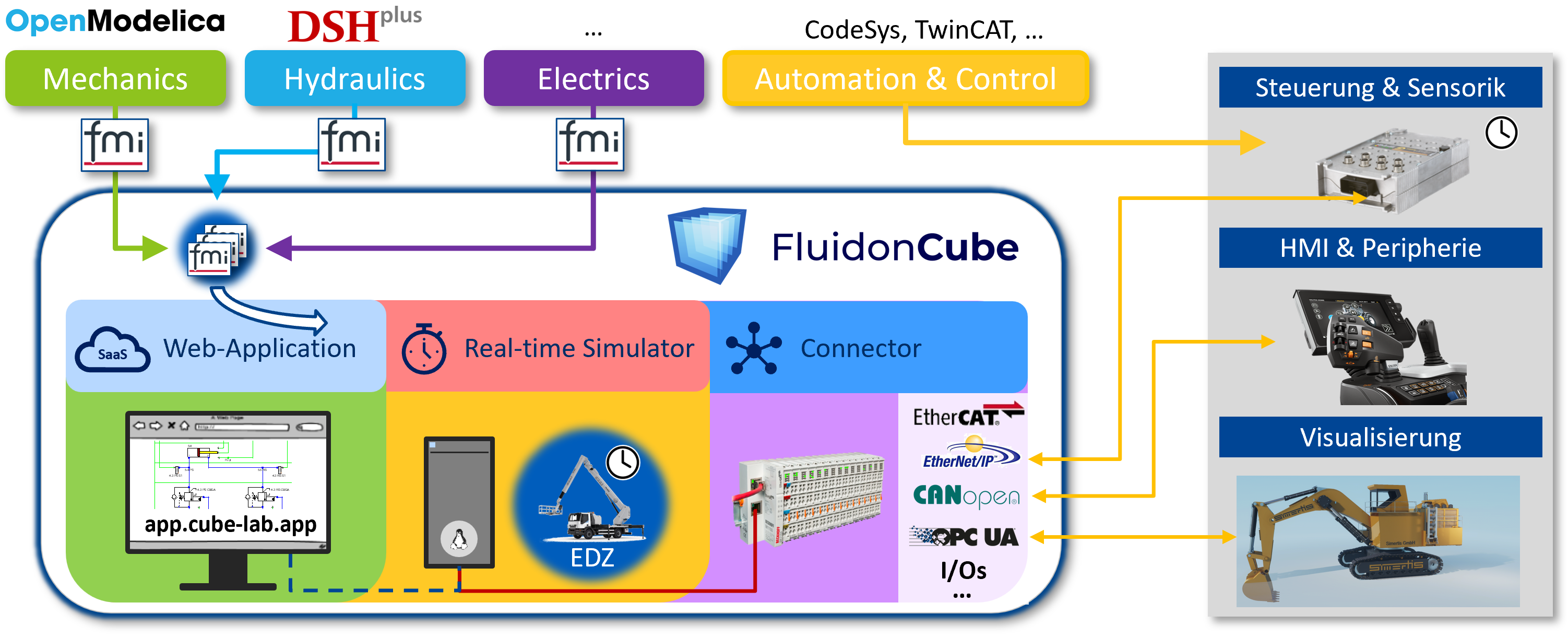
Entwicklung des Echtzeitfähigen Digitalen Zwillings
- Modellierung des EDZ zur Abbildung des dynamischen Maschinenverhaltens
- Berücksichtigung unterschiedlicher Domänen durch Integration von gekapselten Simulationsmodellen aus verschiedenen Simulationswerkzeugen mittels Functional Mock-up Units (FMU)
Entwicklung der Steuerungs- und Reglungsalgorithmen mittels Hardware-in-the-Loop
- Kopplung der Steuerungshardware mit dem EDZ in FLUIDON | Cube HiL
- Antriebsregelungs- und Steuerungsalgorithmen
- Implementierung der Gesamtablaufsteuerung des Assistenzsystems
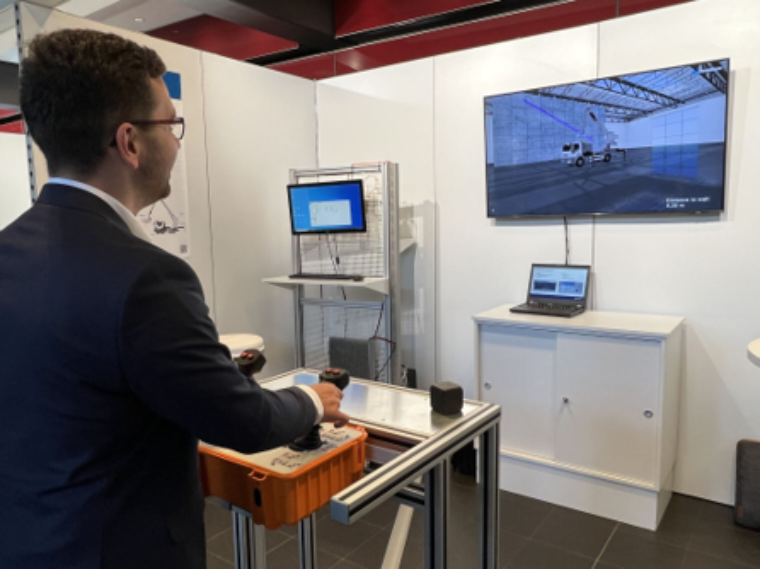
Entwicklung und Test von User-Interaction und User-Experience
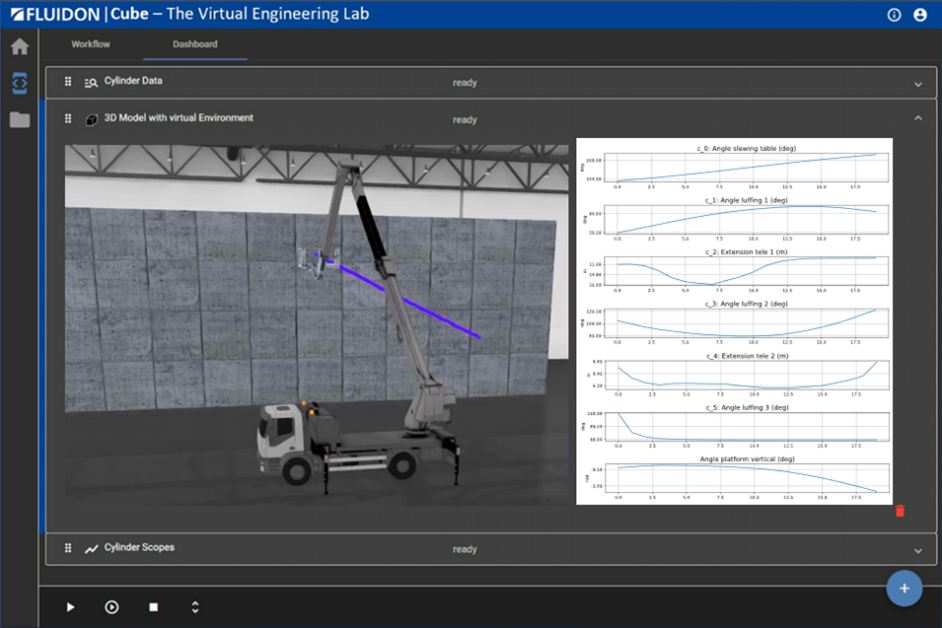
- Einbindung der Bedienerhardware und Kopplung mit 3D-Visualisierung
- Benutzerfeedback zur Bedienung und zum User-Interface
Entwicklung der Bahnkurvenplanung und Berechnung der Antriebszustandsvektoren
- Technisch-mathematische Beschreibung der Maschinen-Antriebskinematik
- Algorithmen für die Bahnkurvenplanung und -berechnung im Raum
- Berechnung individueller Antriebs-Führungsgrößen (x, v/ / ϕ, ω) für die räumliche Bewegung des Korbs
- Berücksichtigung von Optimierungszielen, wie die gleichförmige und ruckfreie Bewegung aller Antriebe oder die Minimierung der erforderlichen Antriebsleistung des Gesamtsystems
Weitere Informationen
- FLUIDON Cube - The Virtual Engineering Lab
- Konferenzbeitrag: Müller et al. (2022) - 3D-Bahnkurvensteuerung eines Auslegers am Beispiel einer Hubarbeitsbühne
Detaillierte Fragen zu dem genannten Projekt oder mögliche Lösungen für spezifische Probleme werden direkt von unserem Engineering-Team beantwortet.